자이로스코프를 떠올리면, 어느 방향으로 돌리든, 뒤집히든, 같은 방향으로 균형을 유지하고 회전하는 팽이를 떠올릴수 있습니다. 어떻게 이렇게 되나요?
이것은 운동량의 보존으로 설명할 수 있습니다. 여러분은 이 용어를 전에 들어본 적이 없을지도 모르지만, 여러분은 이것을 경험해 본 적이 있습니다. 예를 들어, 여러분이 회전 의자에 앉아 회전해본 적이 있다면, 팔과 다리를 안쪽으로 모을때 더 빨리 회전하는 것을 알아차렸을 것이다. 운동량은 보존해야 하기 때문에 질량(팔과 다리)을 가까이 가져가면 속도가 빨라집니다
전자제품에서 자이로스코프는 이렇게 보이지는 않습니다. 그것은 방향의 변화를 감지하기 위한 모션을 사용하는 작은 칩입니다. 로봇에서 이 장치는 회전 속도를 측정합니다. 자이로스코프는 주미가 주어진 시간 동안 몇 도를 회전했는지를 계산하기 위해 회전 속도가 필요하기 때문에 중요합니다.
회전 속도를 측정하는 데 사용할 수 있는 축이 두 개 이상 있습니다. 우리가 가장 신경 쓸 축은 요(Yaw), 즉 좌우 회전을 측정하는 것입니다. 주미가 앞뒤로 기울고 있는지, 좌우로 기울고 있는지를 측정할 수도 있습니다. 이 세 개의 축을 롤, 피치, 요라고 한다.
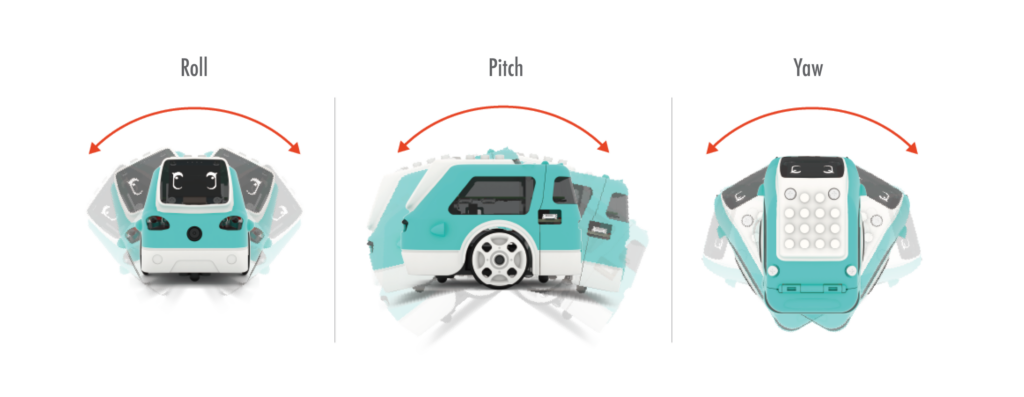
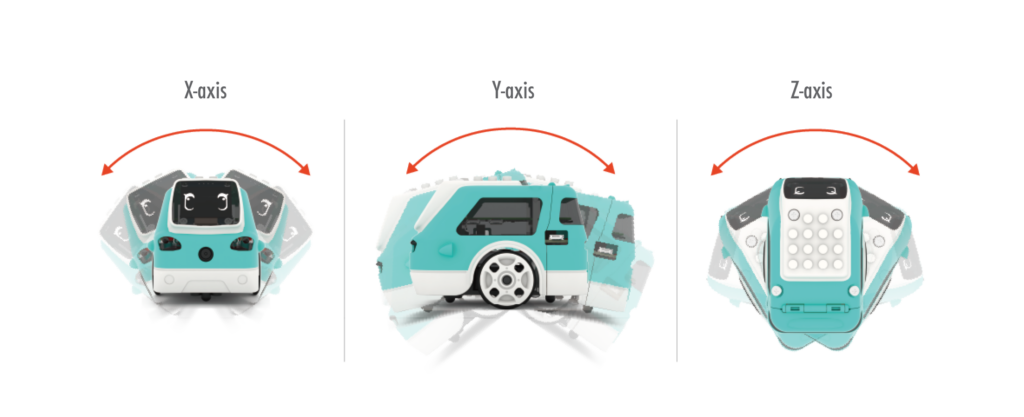
코드에서는 이러한 축을 X, Y, Z라고 부릅니다.
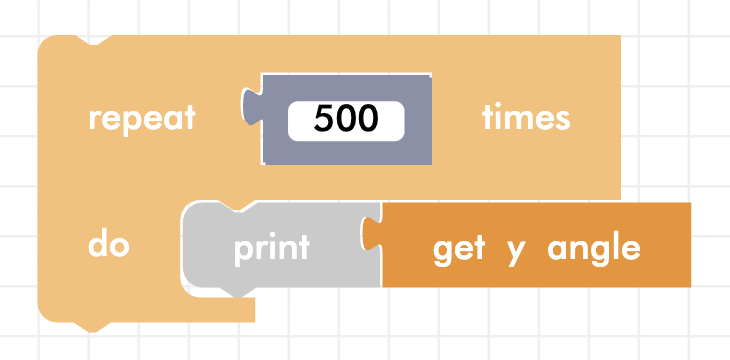
먼저, 다음과 같은 코드를 만들어 주미를 평평한 표면에 놓고 실행합니다. 실행하기 시작하면 그 축에서 주미를 천천히 돌려 숫자가 변하는 것을 보세요.
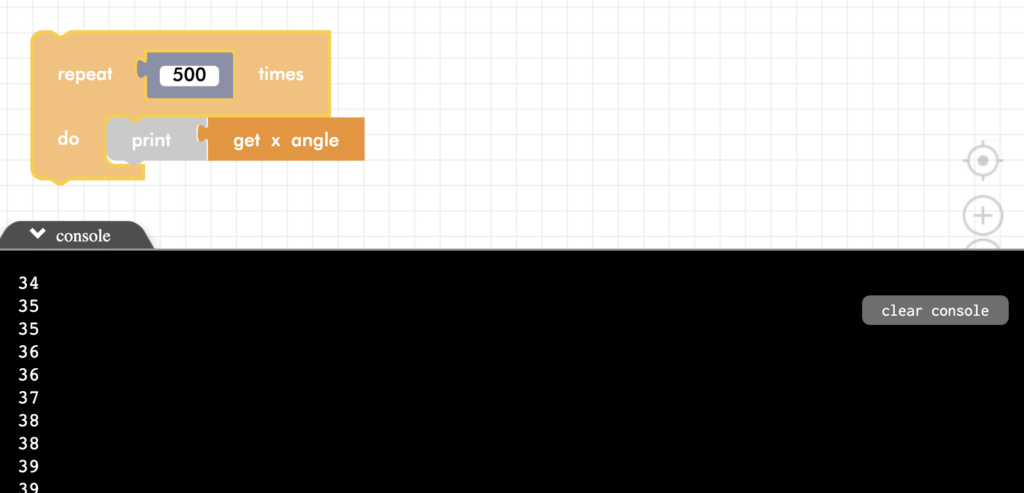
이제 Y축으로 다시 해보세요.