
<aside> 💡 이 단원에서는 전방 거리 센서에 대해 알아보고 활용해 볼 것입니다!
</aside>
코드론 EDU

블록클리
초등학교 고학년부터 - 고등학교 이상 가능
30분 ~ 1시간
코드론 EDU에는 전방의 물체를 감지할 수 있는 전방 거리 센서가 장착되어 있습니다. 코드론 EDU 라이브러리에는 물체를 감지하거나 물체를 피하거나 물체로부터 동일한 거리를 유지할 수 있는 함수가 포함되어 있습니다. 이 수업에서는 드론 앞의 물체를 감지하는 방법을 배우는 것으로 시작합니다. 전방 거리 센서는 0-1000밀리미터(0-100센티미터) 사이의 물체를 감지할 수 있습니다.
전방 거리 센서 값을 출력해 보겠습니다. get_range()함수를 사용할 것입니다. 이 함수는 **밀리미터 단위(mm)**의 값을 반환합니다. 예를 들어 전방 거리 센서 값에 출력된 값이 500이면 500mm(50cm) 떨어진 물체를 감지한다는 의미입니다!

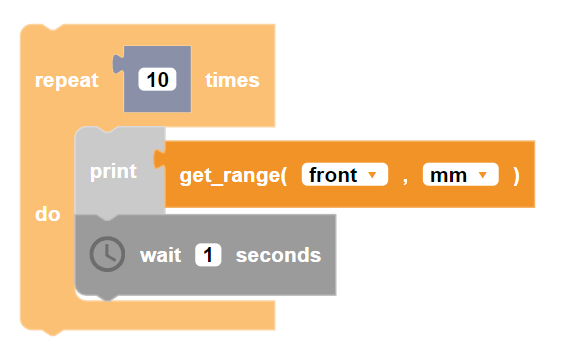
예제 프로그램을 만들어 봅시다. 이 예제에서는 드론을 날리지 않을 것입니다. 대신 1초에 한 번씩 전방 거리 센서 값을 출력하는 프로그램을 실행할 것입니다. for 반복문에서 센서 값을 10번 반복하여 출력해 봅시다! 전방 거리 센서를 10번 출력하려면 for 반복문을 사용해야 합니다. 또한 wait _seconds 블록을 사용하여 초당 1개의 값만 출력해야합니다.
드론을 물체 쪽으로 천천히 이동시키면서 이 프로그램을 실행해 보세요. 이 물체는 당신의 손, 벽, 탁자 또는 전방 거리 센서가 감지할 수 있을 만큼 충분한 크기면 됩니다. 파이썬은 드론에서 해당 물체까지의 정확한 거리를 밀리미터 단위로 출력해야 합니다! ❗한 가지 명심해야 할 점은 전방 범위 센서가 0-1000밀리미터(0-100센티미터) 사이에서 가장 정확하다는 것입니다. 1000밀리미터를 초과하면 드론이 정확한 측정 값을 제공하기 어렵습니다.
조종사는 종종 비행을 시도하기 전에 항공기에서 모든 것이 제대로 작동하는지 확인하기 위해 비행 전에 점검을 진행합니다. 우리가 확인할 수 있는 한 가지는 이륙 장소가 안전한지 확인하는 것입니다. 코드론 EDU의 전방 거리 센서는 최대 1000밀리미터 또는 100센티미터 떨어진 물체를 감지할 수 있습니다. 전방 거리 센서가 있으므로 이 작업을 자동화할 수 있습니다! 다음 프로그램에서는 드론 전면에서 500mm(50cm) 이내에 물체가 없는 경우에만 이륙합니다.